
One of the most critical challenges for a mobile robot is position estimation. Since GPS does not always provide an accurate location, various alternative position-estimation methods have been proposed [1]. In addition to the correct “position”, it is vital to obtain the correct “direction” to ensure that it does not deviate from the driving path. For the direction estimations or measurements, geomagnetic sensors and gyroscopes are often used. However, because geomagnetic sensors are sensitive to metals and do not always provide correct direction, and gyroscopes also contain errors in calculating angular velocity, new sensors' development is in great demand.
The key to finding clues to these new directional sensors lies in living organisms. Organisms move around searching for new food and other resources, but if they change their direction at random, they cannot move far. Suppose there is a left-right bias in their movement. In that case, they will draw an arc and eventually return to their original position, so organisms that can move farther away must have the ability to move in a straight line. These organisms may have some sensory organs to detect their direction.
We surveyed existing research on bees and other insects and found that many insects use the sky’s polarization to keep the right direction. Polarization of the sky is a property of light which oscillation direction is constant due to Rayleigh scattering that occurs when sunlight passes through the atmosphere. By adjusting their movements to maintain a constant view of this light, the insects can move in a roughly linear path (though strictly speaking, their direction changes slightly in response to the sun's movement).
Here, we have developed a sensor for the robot by mimicking these insects' sensory organs to detect polarized light [2]. The sensor captures the light through a polarized film with an ultraviolet sensor and estimates the direction from its brightness. Although several studies on sensors using polarized light have already been proposed, we have added some twists to our sensor to measure high accuracy without strict calibration.
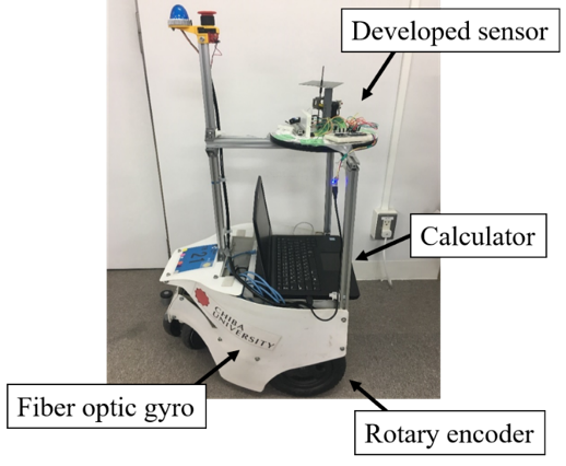
We installed the sensor on the mobile robot shown in Fig. 1 and tested it on a sunny day. We found that its performance was equivalent to the direction calculated from our most accurate fiber-optic gyro.
Although our direction sensor needs a sunny sky environment, it is different from the gyro and magnetometer widely used in mobile robots, so integrating the sensor information with the gyro and the magnetometer information will enable more accurate detection of direction in various environments.
We installed the sensor on the mobile robot shown in Fig. 1 and tested it on a sunny day. We found that its performance was equivalent to the direction calculated from our most accurate fiber-optic gyro.
Although our direction sensor needs a sunny sky environment, it is different from the gyro and magnetometer widely used in mobile robots, so integrating the sensor information with the gyro and the magnetometer information will enable more accurate detection of direction in various environments.
In the future, we will try to reduce the system's size and weight so that we can install it on small unmanned aircraft such as drones flying in the sky.
Reference
- [1] K. Okawa: Self-Localization Estimation for Mobile Robot Based on Map-Matching Using Downhill Simplex Method, Journal of Robotics and Mechatronics, Vol.31, No.2, pp.212-220 (2019), DOI: 10.20965/jrm.2019.p0212
- [2] T. Kasai and K. Okawa: Development of Direction Sensor using Polarized Light in the Sky for Outdoor Mobile Robot, Journal of the Robotics Society of Japan, Vol.38, No.8, pp.746-753 (2020) ,DOI: 10.7210/jrsj.38.746
(河西高志, 大川一也:屋外自律移動ロボットのための天空の偏光を利用した方位センサの開発, 日本ロボット学会誌, Vol.38, No.8, pp.746-753, 2020)
Profile
Kazuya Okawa
Graduated from the Graduate School of Engineering, University of Tsukuba in 1999, Ph. D. Postdoctoral fellow of the Japan Society for the Promotion of Science (JSPS). Visiting researcher at the University of Southern California from 1999-2001. Associate Professor at the University of Chiba since 2016. Specialized in intelligent technologies for autonomous mobile robots.