Research and Development
One of our basic approaches for R&D is to “observe, understand, and emulate” living creatures with flight capabilities; we observe the flight characteristics of insects and birds and analyze them using engineering tools. The second approach is to create clever drones through improving the control system and design of drones. With these approaches, we aim to overcome the challenges of existing drones and develop novel drones.
DOI:10.1088/1748-3182/6/4/045002
DOI:10.20965/jrm.2018.p0337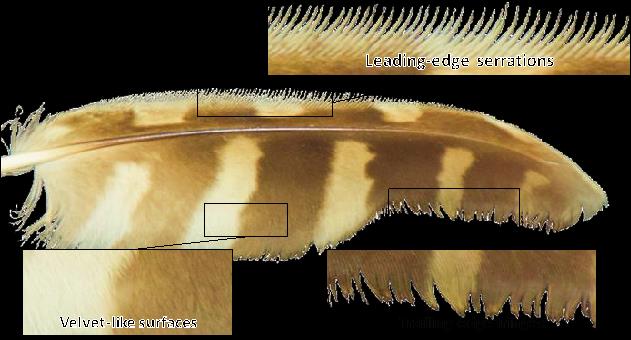

Unmanned Aerial Robot with Flapping Wings
Insects and birds can fly stably with their small bodies. We observe the features of i hawkmoths and hummingbirds, reveal the aerodynamic mechanism of their flight, and apply it to the wings of aerial robots. The latest model, second-generation, weighs between 3.0 and 7.0g. This small, maneuvering robot is expected to be used for reconnaissance in buildings during emergencies such as disasters, and disinfection to prevent spreading infectious diseases.DOI:10.1088/1748-3182/6/4/045002
Owl-inspired Silent Rotor for Drone
Owls are known for their silent flight. We observe the features of owls' feathers, analyze the mechanism behind the silence, and apply it to the rotor of drones. We have tested a variety of attachments to rotors and successfully reduced the noise generated from rotors on a hovering drone. We are now developing quieter and more stable rotor-blades, taking inspiration from the other kinds of birds.DOI:10.20965/jrm.2018.p0337
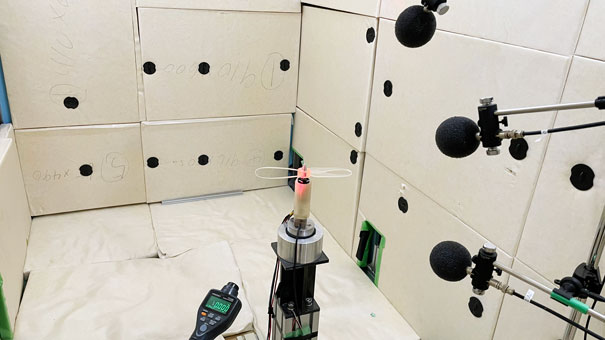
Psychoacoustic Analysis
It is well known that the location of a drone's propellers creates much noise. The noise level of a flying drone reaches way more than a running car. At CAIV, we are developing silent rotor blades, but it is also essential to investigate how the human ear hears these sounds. In our anechoic chamber, we analyze the psychoacoustic effects of each noise by recording the sound with a microphone array while adjusting the rotation speed in various types of propellers.
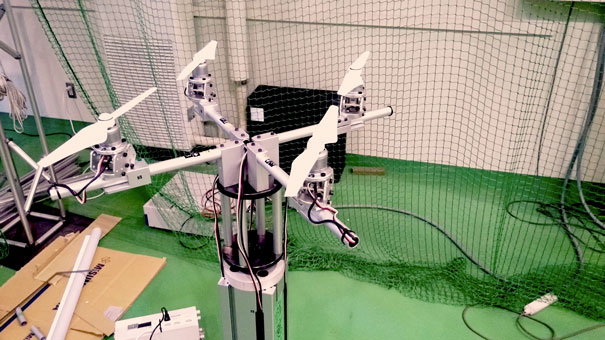
Optimization of Propeller Configuration
Typical drones have four propellers. We are studying to find the best formation for propeller inclination and distance between propellers from aerodynamic performance. CAIV's equipment can perform various experiments on propeller formation with automatic rotation control and data acquisition. In addition, we use Computational Fluid Dynamics (CFD) simulations to understand aerodynamic performance and the physics of the flow.
Bird-inspired Rotor with Collision-Safety Function
Birds’ flight is surprisingly robust even at low altitude or in turbulent air. We are now developing rotors inspired by bird's wings. We have just completed a prototype of the rotor that can reduce the impact of collisions. We are also developing rotors that are resistant to unpredictable turbulent air.
Small Drones with Coordinated Flight System
Small drones less than 200g are known to easy to use in terms of law regulations. We are developing a system to realize coordinated flights between multiple small drones. The system can be used for inspecting plumbings in a city or collecting information inside buildings during a disaster.
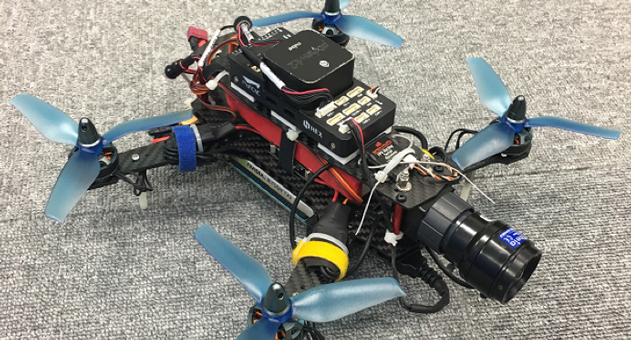
Fast visual servos to control drone flight
One of the challenges for exisitng drones is to respond quickly to visual information. “High-speed vision” is one way to tackle this challenge. Using a high-speed monocular camera and a parallel processing unit for image processing, we are working on visual feedback control with a rate of 30 Hz to realize a stable flight control.
Academic Papers
FY 2022
Liu, Nakata lab, Yonezawa
Morphological effects of leading-edge serrations on acoustic signatures of a mixed flow fan
Phys. Fluids., 34(4), 041909(2022) .
DOI:10.1063/5.0088851
Effects of Wing-body Interaction on Hawkmoth Aerodynamics and Energetics at Various Flight Velocities
Phys. Fluids., 34, 051915(2022).
DOI:10.1063/5.0087161
Frequency-based Wind Gust Estimation for Quadrotors using a Nonlinear Disturbance Observe
IEEE Robotics and Automation Letters (RA-L), (2022).
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9827490
Elastic Storage Enables Robustness of Flapping Wing Dynamics
Bioinspir. Biomim., (2022).
10.1088/1748-3190/ac6c66
Robust Control Strategy for Quadrotor Drone Using Reference Model-Based Deep Deterministic Policy Gradient
Drones, 1856824(2022).
10.3390/drones6090251
Characterization of the low-noise drone propeller with serrated Gurney flap
Frontiers in Aerospace Engineering, 1:1004828(2022) .
10.3389/fpace.2022.1004828
Namiki Lab
多眼視覚ロボット
日本ロボット学会誌, Vol.40, No.5, pp.387-392,(2022) .
10.7210/jrsj.40.387
FY 2021
Liu, Nakata lab, Yonezawa
Novel flight style and light wings boost flight performance of tiny beetles
Nature. 25,103692 (2022).
DOI:10.1038/s41586-021-04303-7
Bristled-wing design of materials, microstructures and aerodynamics enables flapping flight in tiny wasps.
iScience. 25,103692 (2022).
DOI:10.1016/j.isci.2021.103692
Aeroacoustic interaction between owl-inspired trailing-edge fringes and leading-edge serrations
Physics of Fluids . 34, 011907 (2022).
DOI:10.1063/5.0078974
Effect of Ducted Multi-Propeller Configuration on Aerodynamic Performance in Quadrotor Drone
Drones . 5(3), 101 (2021).
DOI:10.3390/drones5030101
Aeroacoustic characteristics of owl-inspired blade designs in a mixed flow fan: effects of leading- and trailing-edge serrations
Bioinspiration & Biomimetics. 16, 6 (2021).
DOI:10.1088/1748-3190/ac1309
A Biomimetic Rotor-configuration Design for Optimal Aerodynamic Performance in Quadrotor Drone
Journal of Bionic Engineering . 18, pages 824–839 (2021).
DOI:10.1007/s42235-021-0069-0
A six-degree-of-freedom proportional-derivative control strategy for bumblebee flight stabilization
Journal of Biomechanical Science and Engineering. 16, 4, 21-00113 (2021).
DOI:10.1299/jbse.21-00113
Flexible Flaps Inspired by Avian Feathers Can Enhance Aerodynamic Robustness in low Reynolds Number Airfoils
Frontiers in Bioengineering and Biotechnology. 9, 612182 (2021).
DOI:10.3389/fbioe.2021.612182
Flexibility Effects of a Flapping Mechanism Inspired by Insect Musculoskeletal System on Flight Performance
Frontiers in Bioengineering and Biotechnology. 9, 612183 (2021).
DOI:10.3389/fbioe.2021.6121832
昆虫に学ぶバイオミメティクス
昆虫と自然, 12月臨時増刊号, ニュー・サイエンス社,2-4 (2021).
次世代ドローンにおけるバイオミメティクス技術研究開発の動向
月刊機能材料, 2022年3月号.
蚊の飛行メカニズム
昆虫と自然, 12月臨時増刊号, ニュー・サイエンス社,20-23 (2021).
Namiki lab
Origami Folding by Multifingered Hands with Motion Primitives
Cyborg and Bionic Systems Volume 2021, Article ID 9851834 (2021).
DOI:10.34133/2021/9851834
Real-Time Visual Feedback Control of Multi-Camera UAV
Journal of Robotics and MechatronicsVol.33 No.2, pp. 263-273, (2021).
DOI:10.20965/jrm.2021.p0263
Assist system for remote manipulation of electric drills by the robot “WAREC-1R” using deep reinforcement learning
RoboticaVol. 40 , Issue 2, 365-376, (2022).
DOI:10.1017/S0263574721000618
Arai lab
並列座標降下法によるマルチエージェント逆強化学習の学習速度改善
人工知能学会論文誌, Vol. 36, No.5, (2021).
DOI:10.1527/tjsai.36-5_AG21-B
Estimation of personal driving style via deep inverse reinforcement learning
Artif Life Robotics, 26, 338–346 (2021).
DOI:10.1007/s10015-021-00682-2
Charge/Discharge Control of Wayside Batteries via Reinforcement Learning for Energy-Conservation in Electrified Railway Systems
Electrical Engineering Japan, Vol. 140 No. 11, 807–816, (2021).
DOI:10.1002/eej.23319
Kohri lab
Control of structural coloration by natural sunlight irradiation on a melanin precursor polymer inspired by skin tanning
Biomacromolecules, 22, 1730-1738, (2021).
DOI:10.1515/nanoph-2021-0437
Stimuli-responsive biomimetic metallic luster film using dye absorption and specular reflection from layered microcrystals
ACS Appl.Polym. Mater., 3, 1819-1827, (2021).
DOI:10.1021/acsapm.0c01396
Bright solvent sensor using an inverse opal structure containing melanin-mimicking polydopamine
Chem. Lett., 50, 106-109. (2021).
DOI:10.1246/cl.200626
Generation of hexagonal close-packed ring-shaped structures using an optical vortex
Nanophotonics, 000010151520210437, (2021).
DOI:10.1515/nanoph-2021-0437
玉虫と孔雀の美しさ/人工メラニンによる構造発色材料
Biomimetica, 4, 12-13, (2021).
Ishikawa lab
昆虫の翅の発生機構と制御
昆虫と自然, 12月臨時増刊号, ニュー・サイエンス社,5-9 (2021).
Takahashi lab
トンボ目の翅の進化的系譜
昆虫と自然, 12月臨時増刊号, ニュー・サイエンス社, (2021).
FY 2020
Liu and Nakata lab
Simulation-based Insect-inspired Flight Systems
Insect Science, 42, pp.105-109 (2020)
DOI:10.1016/j.cois.2020.10.001
Intermittent control strategy can enhance stabilization robustness in bumblebee hovering
Bioinspiration & Biomimetics, 16 016013 (2020)
DOI:10.1088/1748-3190/abbc65
Effects of Reynolds number and distribution on passive flow control in owl-inspired leading-edge serrations
Integrative and Comparative Biology, 60-5, pp.1135–1146, (2020)
DOI:10.1093/icb/icaa119
Aerodynamic performance of a bristled wing of a very small insect
Experiments in Fluids, 61, 194, (2020)
DOI:10.1007/s00348-020-03027-0
Exploring a bumblebee-inspired poweroptimal flapping-wing design for hovering on Mars based on a surrogate model
EJournal of Biomechanical Science and Engineering, 15-2, p.20-00001, (2020)
DOI:10.1299/jbse.20-00001
Effects of wing-to-body mass ratio on insect flapping flights
Physics of Fluids, 33, 021902 (2021)
DOI:10.1063/5.0034806
A CFD Data-Driven Aerodynamic Model for Fast and Precise Prediction of Flapping Aerodynamics in Various Flight Velocities
Journal of Fluid Mechanics, 33, 021902 (2021)
DOI:10.1017/jfm.2021.68
Aerodynamic imaging by mosquitoes inspires a surface detector for autonomous flying vehicles
Science, Vol. 368, Issue 6491, pp. 634-637 (2020)
DOI:10.1126/science.aaz9634
Evaluation of drag force of a thrip wing by using a microcantilever
Journal of Applied Physics, 126, 224701 (2019)
DOI:10.1063/ 1.5126617
Namiki lab
Articulated Object Tracking by High-Speed Monocular RGB Camera
IEEE Sensors Journal (Early Access), (2020)
DOI:10.1109/JSEN.2020.3032059
Target Tracking of Moving and Rotating Object byHigh-Speed Monocular Active Vision
IEEE Sensors Journal, 20-12, pp. 6727-6744,(2020)
DOI:10.1109/JSEN.2020.2976202
ジャグリングロボットとエアホッケーロボット
日本ロボット学会誌, 38-4, pp.307-312,(2020)
DOI:10.7210/jrsj.38.307
Suzuki lab
非平面マルチロータヘリコプタの姿勢・位置独立制御
日本ロボット学会誌, 38 巻2 号,pp.74-80,(2020)
DOI:10.7210/jrsj.38.192
Okawa lab
屋外自律移動ロボットのための天空の偏光を利用した方位センサの開発
日本ロボット学会誌, Vol.38, No.8,pp.746-753,(2020)
DOI:10.7210/jrsj.38.746
Kohri lab
Progress in polydopamine-based melanin mimetic materials for structural color generation
Science and Technology of Advanced Materials, pp.833-848,(2020)
DOI:10.1080/14686996.2020.1852057
Bright solvent sensor using an inverse opal structure containing melaninmimicking polydopamine
Chemistry Letters,Vol.50, No.1, 106-109, (2021)
DOI:10.1246/cl.200626
Effect of the polydopamine composite method on structural coloration: comparison of binary and unary assembly of colloidal particles
Langmuir, 36, pp.11880-11887,(2020)
DOI:10.1021/acs.langmuir.0c01904
Biomimetic structural color materials based on artificial melanin particles
Journal of Photopolymer Science and Technology, 33-1, pp.111-116,(2020)
DOI:10.2494/photopolymer.33.111
Full-colormagnetic nanoparticles based on holmium-doped polymers
ACS Applied Polymer Materials, pp.1800-1806,(2020)
DOI:10.1021/acsapm.0c00038
Poly-β-ketoester particles as a versatile scaffold for lanthanide-doped colorless magnetic materials
ACS Applied Polymer Materials,, pp.2170-2178,(2020)
DOI:10.1021/acsapm.0c00149
Arai lab
複数環境におけるエキスパート軌跡を用いたベイジアン逆強化学習
人工知能学会論文誌, 35-1, p. G-J73_1-10,(2020)
DOI:10.1527/tjsai.G-J73
Kubo lab
放射目を臼目とする2つの木摺臼の摺面形状比較ー民具の形から読み取ることができる合理性と造形のアイデアー
民具研究, 162,(2021)
Kato lab
森林モニタリングのためのレーザー技術
計測と制御, 59-5, pp. 326-330,(2020)
DOI:10.11499/sicejl.59.326
Towards spatially explicit quantification of pre- and post-fire fuels and fuel consumption from traditional and point cloud measurements
Forest Science, 66(4) pp. 428-442,(2020)
DOI:10.1093/forsci/fxz085
Quantifying fire trends in boreal forests with Landsat time series and self-organized criticality
Forest Science,237,11525,(2020)
DOI:10.1016/j.rse.2019.111525
FY 2019
Low Reynolds number aerodynamics of leading-edge and trailing-edge hinged control surfaces: Part I Statics
Aerospace Science and Technology, Volume 99, (2019)
DOI:10.1016/j.ast.2019.105563
Modulation of flight muscle recruitment and wing rotation enables hummingbirds to mitigate aerial roll perturbations
Current Biology, S0960-9822(19)31464-2, (2019)
DOI:10.1016/j.cub.2019.11.025
Wing morphology and inertial properties of bumblebees
Journal of Aero Aqua Bio-mechanisms, 8(1), 41-47, (2019)
DOI:10.5226/jabmech.8.41
The dynamics of passive feathering rotation in hovering flight of bumblebees
Journal of Fluid & Structure, Volume 91, (2019)
DOI:10.1016/j.jfluidstructs.2019.03.021
FY 2018
Formation Control of Multiple Quadcopters Using Model Predictive Control
Advanced Robotics, volume 32, issue 19 (2018)
DOI:10.1080/01691864.2018.1470572
Press Coverage
FY 2021
Research.comが発表した工学技術系分野のトップ研究者にランクイン
Research.com(日本国内では29位)
2022年3月23日
“羽毛のような羽”持つ小さな昆虫 その独特の飛び方を解明
NHK
2022年1月29日
「骨だけのウチワ」のような翅で飛ぶ昆虫の飛行原理を解明!
ナゾロジー
2022年1月22日
体長約0.4mmの羽毛昆虫が飛べる仕組み、千葉大などが解明
マイナビニュース
2022年1月24日
Tiny feather wing beetle reveals new way to flye
Nature Video
2022年1月1日
ドローンで草刈りの実証実験 「林業の負担軽減に」 大分 由布
NHK
2021年11月12日
BlueBeeと千葉大学、九州電力、下刈りドローンの実証試験を実施
ドローンジャーナル
2021年11月10日
Creating Next-generation Inks that Never Fade
NHK World, Science View
2021年8月24日
Creating Next-generation Inks that Never Fade
NHK World, Science View
2021年8月24日
虫の方向感覚を参考にした移動ロボット!? 子どもたちがワクワク気分で試乗
チバテレビ/Yahoo!ニュース
2021年7月3日
FY 2020
ハチのように飛ぶ火星探査ロボット
ニュートン7月号
2020年5月26日
暗闇でも飛ぶ蚊 気流の乱れを察知 千葉大
日本経済新聞
2020年5月24日
暗闇の蚊 飛べるワケ 気流の乱れ触角で検知
産経新聞
2020年5月24日
蚊が暗闇でも飛べる理由 気流の変動で障害物検知 身体に備わる超感度センサー 千葉大など解明
科学新聞
2020年5月22日
真夏の夜の「ぷ〜ん」…羽ばたきの気流頼り
朝日新聞
2020年5月18日
蚊が暗闇で飛べる秘密わかった
東京新聞
2020年5月17日
蚊、羽ばたき気流で障害物感知
読売新聞
2020年5月16日
蚊、なぜ暗闇で自由に飛べる飛べる 羽ばたきの気流で障害感知 千葉大など
北海道新聞
2020年5月11日
蚊が暗闇で飛べる秘密解明 かすかな気流で障害感知―千葉大など:時事ドットコム
時事通信
2020年5月8日
FY 2019
宅配から開始 ドローン産業集積へ 千葉大、開発支え人材育成
日刊興業新聞
2020年1月12日
昆虫の飛行 立体的に 千葉大、展示で紹介
読売新聞
2019年11月13日
企画展「生き物を観る・知る・真似る」
千葉日報
2019年10月23日
千葉大、生物模したドローン開発 自然環境変化に対応
日刊興業新聞
2019年12月16日