2022.11.1
Biomimetics for Drones: Overview of the Latest Trends
The utilization of small unmanned aerial vehicles (SUAVs), commonly known as drones, has increased drastically in various industries in the past decade. Commercial drones face challenges in terms of safety, durability, flight performance, and environmental effects such as the risk of collision and damage. To tackle these challenges, new research and developments based on biomimetics are underway. The members of CAIV recently wrote a review paper to showcase the latest developments in these studies, showing how promising designs and additional features are being provided to meet the objectives. The authors also emphasized the need to create a roadmap for future technological development with biodiversity conservation as a primary condition, including recognizing habitats for rare wildlife and migratory birds, considering biodegradable materials, and developing technologies for monitoring organisms and the environment. The review paper was published in the specialized journal Drones on October 26, 2022.
Research Background
The history of small unmanned aerial vehicles (SUAVs), commonly known as drones, can be traced back to human curiosity regarding how flying animals navigate the sky. In 1503, a sketch by Leonardo da Vinci in Italy depicted the novel idea of creating a rotor wing based on the mechanism of bird flapping in nature. In Japan, around 1825, Ikkansai Kunitomo, a blacksmith and inventor, created a drawing of a flapping-wing air-craft design. He measured the shape and weight of a brown-eared nightjar’s wings, tail, and body and derived the corresponding lengths for a flying machine based on the ratio of the weight to that of the human body. These are considered the pioneering efforts in “biomimetics”.
The term “biomimetics” was originally coined by Otto Schmitt, an American neuro-physiologist, in 1957. He invented the “Schmitt trigger,” which is an electrical circuit that mimics signal processing in the nervous system and converts an input signal into a square wave, from which noise is removed. ISO now defined biomimetics as “interdisciplinary cooperation of biology and technology or other fields of innovation with the goal of solving practical problems through the function analysis of biological systems, their abstraction into mod-els, and the transfer into and application of these models to the solution”. In recent years, researchers in various fields have focused on biomimetics, which is expected to bring sustainable innovation by learning from the survival strategies of living creatures.
The term “biomimetics” was originally coined by Otto Schmitt, an American neuro-physiologist, in 1957. He invented the “Schmitt trigger,” which is an electrical circuit that mimics signal processing in the nervous system and converts an input signal into a square wave, from which noise is removed. ISO now defined biomimetics as “interdisciplinary cooperation of biology and technology or other fields of innovation with the goal of solving practical problems through the function analysis of biological systems, their abstraction into mod-els, and the transfer into and application of these models to the solution”. In recent years, researchers in various fields have focused on biomimetics, which is expected to bring sustainable innovation by learning from the survival strategies of living creatures.
Research Findings
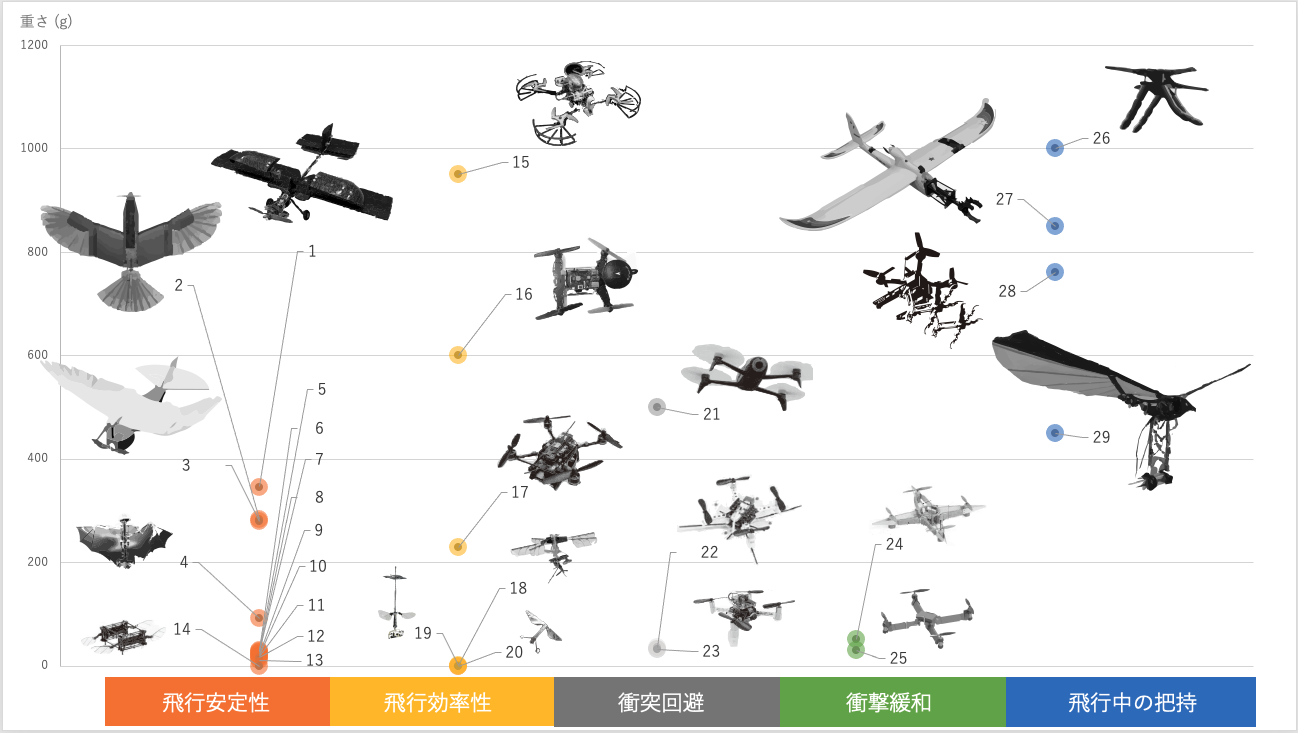
The research team reviewed the recent advances in biomimetic approaches for drone/SUAV development based on the challenges faced by current drones—namely, flight stability, flight efficiency, collision avoidance, damage mitigation, and grasping during flight. The team found out that these approaches have provided various promising designs and additional functions to achieve better performance than conventional drones and have further accelerated the trend toward miniaturization. Also the team revailed some future tasks on the research and development associated with biomimetic drones in terms of innovative design, flight control technologies, and biodiversity conservation.- (1) Most current studies have adopted the approach of extracting some of the morphologies and/or functions of flying birds and insects, reproducing their characteristics, and implementing them in drone mechanisms. To realize highly integrated mechanical system as flying animals, innovative designs with new fields of study, including insect-inspired artificial intelligence, open science, and bio-hybrids, and development of drones based on ideal model animals, are necessary. These designs should incorporate advanced control techniques, with the preservation of biodiversity as a primary criterion of the design principle.
- (2) The level of control of biomimetic drones has not yet reached that of other robotic technologies, such as precise manipulators and agile mobile robots. Most of these studies have focused only on structural development and dynamic analysis inspired by flying animals. Researchers are expected to consolidate the ideas and designs of existing biomimetic drones and develop an ideal control technology by utilizing Model-based and machine-learning/deep-learning-based control algorithms.
- (3)Biodiversity conservation is essential for drone development because the flight airspace of a drone is under an altitude of approximately 1 km, which overlaps with the range of birds and insects, and noise, light, and electromagnetic waves may interfere with the entire ecosys-tem, which is also crucial for human beings to maintain their life and culture. In particular, researchers in the field of biomimetics should create a roadmap for technological development with biodiversity conservation as the first requirement by recognizing the habitats of rare wildlife and migratory birds, considering biodegradable materials, and developing technolo-gies for monitoring organisms and the environment.
Comments from Authours
One of the corresponding auther, Saori Tanaka says “Biomimetics is a research field with high expectations from the industry. Now is the time to integrate novel ideas accumulated in academia into drones for practical use. Facing the industrial utilization of airspace, we have presented the need to set biodiversity conservation as the primary criterion of design principles for drones. Migratory birds such as swallows, which share airspace with drones, are linked to ecosystems in Japan and Southeast Asia. We hope that our review paper will be a helpful reference in the policy-making process in the future too.”Another corespnding author Hao Liu, Director, Center for Aerial Intelligent Vehicles, says “I am pleased to see that our review article was published. The paper has unconventional viewpoint, taking into account the technical history of aircraft and the ISO definition of biomimetics. Here at Chiba University, we have published many research outcomes on the nature of maneuvering flight mechanisms, as seen in birds and insects. The challenges and prospects presented in this paper should serve as valuable guidelines for incorporating scientific accumulation into drone technology and promoting sustainable development.”
Acknowledgments
This work was supported by Advanced Robotics Foundation and the University of Tokyo Edge Capital Partners Co., Ltd. We also appreciate the two curators at Nagahama Castle History Museum, Hiroshi Ota and Chiaki Okamoto, for their profes-sional support in reading the historical book on Ikkansai Kunitomo.
Publication
Review of Biomimetic Approaches for Drones,Saori Tanaka*, Abner Asignacion, Toshiyuki Nakata, Satoshi Suzuki and Hao Liu* Drones 2022, 6(11), 320 DOI: https://doi.org/10.3390/drones6110320
Contact Us
Saori Tanaka, Communications Manageremail: saori.tanaka@chiba-u.jp