
移動ロボットの技術的側面に目を向けると、走行時の重要な課題の一つに位置推定があります。GPSでは必ずしも正しい位置が出力されないことから、これまで様々な位置推定手法が提案されてきています[1]。また、走行経路から外れないようにするためには、正しい「位置」に加えて、正しい「向き」の情報を得ることが重要となります。向きの計測や推定には、主に地磁気センサやジャイロスコープなどが用いられます。しかし、地磁気センサは金属に反応して正確な方位がわからなくなったり、ジャイロスコープは角速度の算出の際に誤差が含まれてしまったりと、既存のセンサには欠点もあります。こうしたことから、新しいセンサの開発が求められています。
この新しい方向検出センサのヒントを探る鍵が、生物にあります。生物は新たな食料などを求めて移動しますが、進む向きをランダムに変えてしまうと遠くへ移動することができません。動きに左右の偏りがあれば円弧を描き、いずれ元の位置付近に戻ってきてしまうのです。したがって、遠くへ移動できる生物には直線的に移動する能力があると考えられます。こうした生物は、向きを検知するための何らかの感覚器を持っている可能性があります。
当研究室で蜂などの昆虫について既存研究を調査したところ、多くの昆虫は天空の偏光を利用していることが分かりました。天空の偏光とは、太陽光が大気を通過する際に起こるレイリー散乱によって、振動方向が一定となる光の性質のことです。昆虫は、この光の見え方を一定に保つように動きを調整することによって、(厳密には、太陽の動きに応じて少しずつ向きが変わりますが)おおむね直線的に移動することができるのです。
そこで私たちは、これらの昆虫の感覚器を模倣し、天空の偏光を検出するロボット用センサの開発を行いました[2]。このセンサは、偏光フィルムを介して天空の光を紫外線センサで取り込み、その明るさから向きを推定します。偏光を利用したセンサの研究はすでにいくつか提案されていますが、私たちのセンサでは厳密な校正をしなくても高精度で計測できるような工夫を加えています。
そこで私たちは、これらの昆虫の感覚器を模倣し、天空の偏光を検出するロボット用センサの開発を行いました[2]。このセンサは、偏光フィルムを介して天空の光を紫外線センサで取り込み、その明るさから向きを推定します。偏光を利用したセンサの研究はすでにいくつか提案されていますが、私たちのセンサでは厳密な校正をしなくても高精度で計測できるような工夫を加えています。
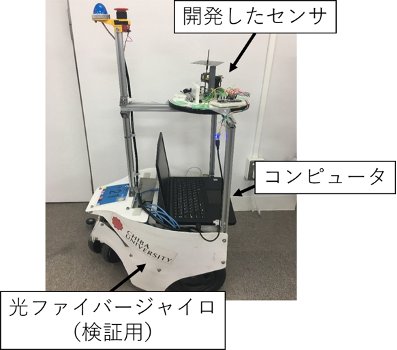
この方位センサが正しく機能するには、「天空が見える晴天の環境」という制約がありますが、移動ロボットに広く用いられているジャイロや地磁気センサとは性質の異なるセンサであることから、これらのセンサ情報と統合させることで、より多様な環境で、より正確な向きの検出が実現できる可能性があります。将来的には、小型軽量化を図り、ドローンなどの小型無人航空機に搭載できるようにしたいと考えています。
Reference
- [1] Kazuya Okawa: Self-Localization Estimation for Mobile Robot Based on Map-Matching Using Downhill Simplex Method, Journal of Robotics and Mechatronics, Vol.31, No.2, pp.212-220 (2019), DOI: https://doi.org/10.20965/jrm.2019.p0212
- [2] 河西高志, 大川一也:屋外自律移動ロボットのための天空の偏光を利用した方位センサの開発, 日本ロボット学会誌, Vol.38, No.8, pp.746-753 (2020),DOI: https://doi.org/10.7210/jrsj.38.746
Profile
大川 一也(おおかわ・かずや)
1999年筑波大学大学院工学研究科博士後期課程修了。博士(工学)。日本学術振興会特別研究員DC2、PDを経て、現在、千葉大学准教授。1999~2001年南カリフォルニア大学客員研究員。自律移動ロボットのための知能化技術などの研究を専門とする。