2025.10.24 鈴木准教授らのドローンチーム、国際ロボット競技会で優勝
2025年10月、国際ロボット競技会「World Robot Summit(WRS)」において、千葉大学の鈴木智准教授率いるICASTが、ドローン部門で見事優勝を果たしました。
WRSでは、産業・災害対応・サービスなど多様な分野でのロボット技術の発展を目指しています。今回ICASTが挑戦したのは、福島国際研究教育機構(F-REI)が主催する「過酷環境F-REIチャレンジ」のなかで、災害対応を想定したドローン競技である「過酷環境ドローンチャレンジ(Harsh Environment Drone Challenge)」。競技では、過酷な災害現場を想定した危険環境での自律飛行、障害物回避、情報収集など高度な技術が求められました。
HEDCには、日本・エクアドル・台湾の3か国から計5チームが参加。その中でICASTは、独自開発の制御アルゴリズムと高精度センサを搭載したドローンを用い、安定した飛行と迅速なデータ取得を実現しました。特に、独自の無線中継システムやStarlink衛星通信を用いた遠隔地からのドローン制御が高く評価され、世界トップレベルの技術力を示しました。
LTE通信が使えない災害時の環境
競技環境では、災害時を想定してLTE通信網が利用できない条件が設定されており、ドローンは完全自律制御でミッションを遂行する必要がありました。 LTEは、4G世代の移動通信規格で、高速データ通信を可能にする技術です。通常はスマートフォンやIoT機器で広く利用されていますが、災害時には基地局の損傷や電力供給停止により利用できない場合があります。鈴木准教授は、「この成果は、実際の災害現場での安全確保や効率的な情報収集に大きく貢献するものです。今後は産業界との連携をさらに強化し、社会実装を加速させたい」とコメントしています。
競技ミッション概要
- Mission 1:緊急車両用ルート策定 全体的な被災状況を調査し、寸断された道路から救援車両ルートを探索する。
- Mission 2:文字認識と物資搬送 地上にかかれている文字を空中から判読し、物資搬送ドローンにより指定された場所に物資を届ける。
- Mission 3:倒壊施設内の生存者把握 倒壊施設内で動けない被災者の状況を建物内に入って調査する。
技術仕様
- ドローンモデル:AC0404-X,AQC-01N,ACSLABUAV
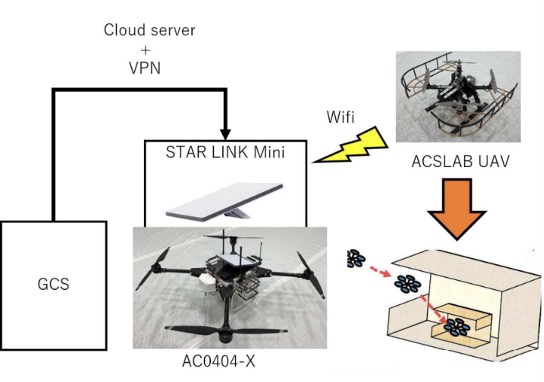
- 通信構成:2.4GHz, 5.7GHz, 220Mhzを複合した無線中継システム Wi-Fi+VPN接続+Starlink中継
- ネットワーク機器:STAR LINK Miniを利用 • 制御方式:クラウドサーバ+GCS(Ground Control Station)連携
- 特徴:複数機体の協調動作、リアルタイム経路最適化、産業用無線通信+衛星通信による冗長性確保
写真
- ドローン外観:保護ガード付き・ガードなしの2タイプ
- 通信構成図:クラウドサーバ、VPN、GCS、Starlink Mini、複数UAVの連携イメージ